

Mobilní mapovací systémy založené na technologii SLAM a LiDAR si v posledních letech našly pevné místo v zeměměřické praxi. Nabízejí výrazné zrychlení sběru dat a rozšiřují možnosti dokumentace prostorů, kde tradiční měřické metody narážejí na své limity. Jaké jsou jejich reálné přínosy a kde naopak zůstávají jejich omezení?
Možnosti mapovacích systémů, založených na SLAM a LiDARu, vysvětluje Bohumír Cochlar z firmy Geopen, která v ČR prodává SLAM skenery značky Feima Robotics.
Měření „za chůze“
Způsob, jakým se v současnosti sbírají prostorová data, se postupně proměňuje. Vedle známých a v podstatě tradičních metod, jako je měření totální stanicí nebo statické laserové skenování, se do praxe prosazují mobilní mapovací systémy.
Zvláštní pozornost přitom poutají ruční skenery využívající kombinaci LiDARu a algoritmů SLAM (Simultaneous Localization and Mapping).
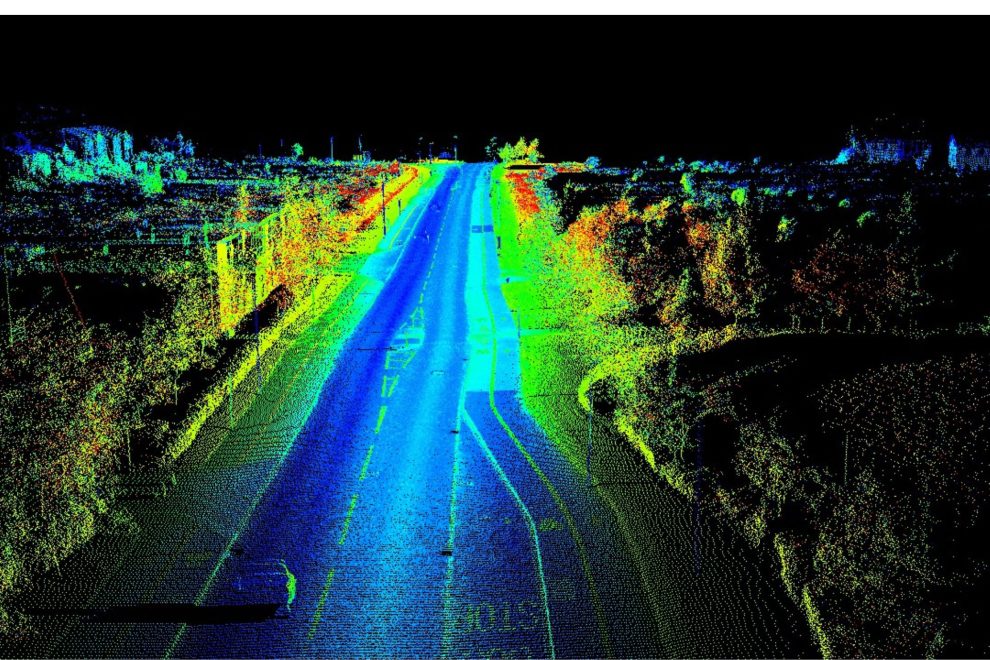
Zatímco terestrické skenování je založeno na postupném stanovování přístroje a následné registraci jednotlivých stanovisek, ruční SLAM LiDAR funguje odlišně. Operátor se pohybuje prostorem a zařízení průběžně snímá okolí. Algoritmy v přístroji v reálném čase určují polohu skeneru a současně vytvářejí výsledné mračno bodů.
Uvedený princip přináší zásadní změnu pracovního postupu. Odpadá nejen časově náročné ustavování přístroje, ale rovněž velká část následného zpracování. Výsledkem je plynulý sběr dat, který se více blíží průzkumu než klasickému měření, jak jej známe.
Významnou roli také hraje nezávislost na signálu GNSS. Ruční SLAM systémy lze bez omezení používat v interiérech, podzemních objektech, historických budovách nebo v husté městské zástavbě.
Rychlost, která mění praxi
Jedním z důvodů, proč si tato technologie nachází cestu do praxe, je výrazná časová úspora. Objekty, jejichž zaměření by tradičními metodami trvalo hodiny nebo dny, lze pomocí ručního skeneru zdokumentovat v řádu desítek minut.
Zásadní je přitom možnost okamžité kontroly. Operátor vidí v reálném čase vznikající mračno bodů a tudíž může ihned odhalit nedostatky v pokrytí. V praxi tato vizuální kontrola výrazně snižuje riziko opakovaných výjezdů.
Tento způsob práce zároveň dobře zapadá do současných digitálních workflow. Data ze SLAM skenerů se běžně využívají jako podklad pro BIM modely, správu majetku nebo tvorbu tzv. digitálních dvojčat.
Přesnost versus efektivita
Přes všechny uvedené výhody však nemůžeme ruční SLAM LiDARy chápat jako univerzální náhradu tradičních metod. Přesnost dat je zpravidla nižší než u statického laserového skenování nebo měření totální stanicí.
V praxi se proto často používá kombinovaný přístup. Ruční skenery slouží pro rychlé zachycení celku. Přesná geodetická měření doplňují klíčové body nebo kontrolní prvky.
Široké spektrum využití
Rozsah aplikací ručních SLAM systémů se neustále rozšiřuje.
Typickými příklady používání ručních SLAM skenerů jsou
- dokumentace skutečného stavu staveb,
- mapování interiérů a technologických celků,
- zaměřování podzemních prostor,
- sledování postupu výstavby,
- podklady pro BIM a facility management.
Vývoj technologií a dostupnost
Rostoucí zájem o mobilní mapování se odrazil v nabídce na trhu. Vedle zavedených výrobců se objevují nová řešení, kombinující různé typy senzorů a přístupů ke zpracování dat.
Do tohoto vývoje vstupují také společnosti zaměřené na LiDAR technologie, jako je například Feima Robotics, jejichž senzory se používají v mobilních i leteckých mapovacích systémech.
Perspektivy dalšího vývoje
V budoucnu můžeme očekávat zlepšování přesnosti i automatizaci procesů ve zpracování dat. S rostoucím výkonem čipů, novými senzory a vylepšenými algoritmy se rozdíly mezi mobilním a statickým skenováním postupně zmenšují.
Ruční SLAM LiDAR nepředstavuje jen novou technologii, mění se přístup ke sběru a zpracování dat – směrem k rychlosti, flexibilitě a komplexnímu zachycení prostředí.
Závěr z praxe
Z pohledu praktického nasazení můžeme ruční SLAM LiDAR vnímat především jako nástroj, který rozšiřuje možnosti zeměměřiče. V situacích, kde je rozhodující rychlost a úplnost zachycení prostoru, představuje velmi efektivní řešení.
Naopak v úlohách vyžadujících vysokou přesnost zůstávají tradiční metody nadále nezastupitelné. Klíčem k efektivnímu využití je proto vhodná kombinace obou přístupů.
Právě tato kombinace – rychlého plošného sběru dat a přesného geodetického určení – se v současnosti ukazuje jako optimální cesta pro řadu praktických aplikací.
Principy, přesnost a omezení SLAM LiDAR
Princip SLAM
Metoda SLAM řeší současně dvě úlohy: určení polohy senzoru v neznámém prostředí a tvorbu mapy tohoto prostředí. V případě SLAM LiDARu je základem porovnávání jednotlivých skenů (scan matching), často doplněné o data z inerciální jednotky (IMU).
Drift (kumulace chyby)
Jedním z hlavních omezení je postupné hromadění chyby v odhadu trajektorie. Tento jev, označovaný jako drift, se projevuje zejména při delších průchodech bez návratu do již nasnímané oblasti.
Loop closure (uzavření smyčky)
Pro omezení driftu využívají SLAM algoritmy detekci návratu do již mapované oblasti. Opětovné „uzavření smyčky“ umožňuje zpřesnit celou trajektorii i výsledné mračno bodů.
Přesnost
Typická absolutní přesnost ručních SLAM systémů se pohybuje v řádu centimetrů (cca 1–5 cm v závislosti na podmínkách a zařízení). Relativní přesnost v rámci kratších úseků může být vyšší.
Vliv prostředí
Kvalita výsledků je závislá na charakteru prostředí. Problematické jsou zejména homogenní prostory bez výrazných prvků jako jsou například dlouhé chodby, dynamické objekty (pohyb osob, vozidel) nebo lesní prostředí s opakující se strukturou.
Georeferencování
Pro přesné zasazení do souřadnicového systému je nutné využít kontrolní body, případně kombinaci s GNSS nebo totální stanicí.
Doporučení pro praxi
- plánovat trasu s ohledem na možnost loop closure,
- vyhýbat se dlouhým lineárním průchodům bez návratu,
- kombinovat se stabilními referenčními body,
- ověřovat kvalitu dat již v terénu.
Porovnání mezi SLAM a statickým laserovým skenováním
| Kritérium | Ruční SLAM LiDAR | Statické laserové skenování (TLS) |
| Princip měření | kontinuální skenování za pohybu | měření ze stanovisek |
| Rychlost sběru dat | velmi vysoká | nižší |
| Přesnost | cm úroveň | mm až sub-cm |
| Závislost na GNSS | ne | ne |
| Potřeba registrace | minimální / automatická | nutná (targety / cloud-to-cloud) |
| Kontrola dat v terénu | v reálném čase | omezená |
| Vhodnost pro interiéry | velmi dobrá | velmi dobrá |
| Vhodnost pro přesná měření | omezená | vysoká |
| Nároky na obsluhu | nižší | vyšší |
| Typické použití | rychlá dokumentace, BIM, průzkum | přesná dokumentace, geodézie |
Rádi byste se zeptali na možnosti ručních skenerů? Bohumír Cochlar je k dispozici na e-mailu cochlar@geopen.cz nebo na telefonním čísle +420 739 350 294.


